Introduction to A* Algorithm
The A* (A-star) algorithm is highly popular. It is widely used in pathfinding algorithms in computer science. It is also common in artificial intelligence. It finds the shortest path between two nodes in a weighted graph. This makes it particularly useful in applications like game development, robotics, and network routing.
Why Learn the A* Algorithm?
- Efficiency: A* is known for its optimal efficiency in finding the shortest path.
- Versatility: It can be used in various applications from gaming to GPS navigation.
- Foundation: Understanding A* helps build a strong foundation for learning other advanced algorithms.
How Does the A* Algorithm Work?
The A* algorithm combines the strengths of Dijkstra’s algorithm and Greedy Best-First-Search. It uses a heuristic to guide its search, which helps it find the shortest path more efficiently.
Key Concepts:
- Nodes and Edges: The algorithm works on graphs composed of nodes (points) and edges (connections between points).
- Cost Function (f): The algorithm uses a cost function,
f(n) = g(n) + h(n), where:g(n)is the cost from the start node to the current noden.h(n)is the heuristic estimate of the cost fromnto the goal.
- Open and Closed Sets:
- Open Set: The set of nodes to be evaluated.
- Closed Set: The set of nodes already evaluated.
Step-by-Step Process:
- Initialize the Open Set: Start with the initial node.
- Current Node Selection: Select the node with the lowest
fvalue from the open set. - Goal Check: If the current node is the goal, reconstruct the path and end.
- Neighbor Evaluation: For each neighbor of the current node:
- Calculate the tentative
gscore. - If this score is better than the previous score, update the path.
- Update the neighbor’s
fvalue and add it to the open set if not already present.
- Calculate the tentative
- Repeat: Continue until the open set is empty or the goal is reached.
Example Diagram:
Start
|
[A]--1--[B]--2--[C]
| / | / |
3| 1 5 2 |1
| / | / |
[D]--2---[E]--1--[F]--Goal
StarttoGoalvia the shortest path[A, B, E, F].
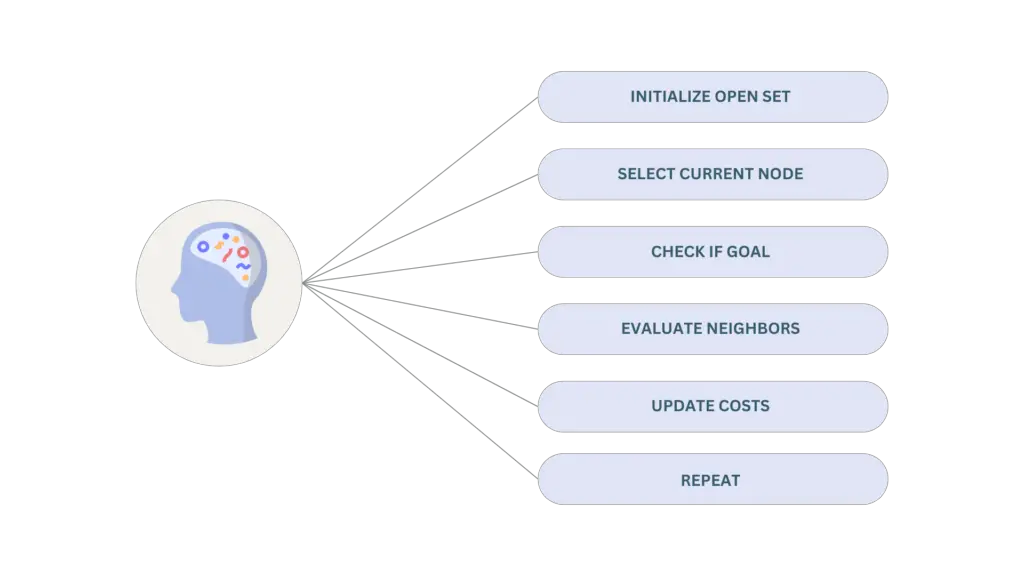
Visualizing A* Algorithm
Mind Map
Here’s a visual representation of the A* algorithm:
A* Algorithm
|
+-----------+------------+
| |
Nodes Edges
| |
+-----+-----+ +-----+-----+
| | | |
Open Set Closed Set Cost Function Heuristic
Flowchart
Implementation of A* Algorithm
Let’s look at the implementation of the A* algorithm in both Java and Python.
Java Implementation
import java.util.*;
class Node {
public String name;
public List<Edge> neighbors;
public int g, h, f;
public Node parent;
public Node(String name, int h) {
this.name = name;
this.h = h;
this.g = 0;
this.f = 0;
this.neighbors = new ArrayList<>();
}
public void addNeighbor(Node neighbor, int cost) {
neighbors.add(new Edge(neighbor, cost));
}
}
class Edge {
public Node node;
public int cost;
public Edge(Node node, int cost) {
this.node = node;
this.cost = cost;
}
}
public class AStarAlgorithm {
public static List<Node> aStar(Node start, Node goal) {
PriorityQueue<Node> openSet = new PriorityQueue<>(Comparator.comparingInt(node -> node.f));
Set<Node> closedSet = new HashSet<>();
openSet.add(start);
while (!openSet.isEmpty()) {
Node current = openSet.poll();
if (current == goal) {
return reconstructPath(current);
}
closedSet.add(current);
for (Edge edge : current.neighbors) {
Node neighbor = edge.node;
if (closedSet.contains(neighbor)) continue;
int tentativeG = current.g + edge.cost;
if (!openSet.contains(neighbor) || tentativeG < neighbor.g) {
neighbor.parent = current;
neighbor.g = tentativeG;
neighbor.f = neighbor.g + neighbor.h;
if (!openSet.contains(neighbor)) {
openSet.add(neighbor);
}
}
}
}
return Collections.emptyList(); // No path found
}
private static List<Node> reconstructPath(Node current) {
List<Node> path = new ArrayList<>();
while (current != null) {
path.add(current);
current = current.parent;
}
Collections.reverse(path);
return path;
}
public static void main(String[] args) {
Node start = new Node("Start", 4);
Node a = new Node("A", 2);
Node b = new Node("B", 2);
Node c = new Node("C", 1);
Node goal = new Node("Goal", 0);
start.addNeighbor(a, 1);
a.addNeighbor(b, 1);
b.addNeighbor(c, 1);
c.addNeighbor(goal, 1);
List<Node> path = aStar(start, goal);
for (Node node : path) {
System.out.print(node.name + " ");
}
}
}Python Implementation
import heapq
class Node:
def __init__(self, name, h):
self.name = name
self.g = 0
self.h = h
self.f = 0
self.neighbors = []
self.parent = None
def add_neighbor(self, neighbor, cost):
self.neighbors.append((neighbor, cost))
def __lt__(self, other):
return self.f < other.f
def a_star(start, goal):
open_set = []
heapq.heappush(open_set, start)
closed_set = set()
while open_set:
current = heapq.heappop(open_set)
if current == goal:
return reconstruct_path(current)
closed_set.add(current)
for neighbor, cost in current.neighbors:
if neighbor in closed_set:
continue
tentative_g = current.g + cost
if tentative_g < neighbor.g or neighbor not in open_set:
neighbor.parent = current
neighbor.g = tentative_g
neighbor.f = neighbor.g + neighbor.h
if neighbor not in open_set:
heapq.heappush(open_set, neighbor)
return [] # No path found
def reconstruct_path(current):
path = []
while current:
path.append(current.name)
current = current.parent
return path[::-1]
# Example Usage
start = Node("Start", 4)
a = Node("A", 2)
b = Node("B", 2)
c = Node("C", 1)
goal = Node("Goal", 0)
start.add_neighbor(a, 1)
a.add_neighbor(b, 1)
b.add_neighbor(c, 1)
c.add_neighbor(goal, 1)
path = a_star(start, goal)
print(" -> ".join(path))
Conclusion
The A* algorithm is a powerful and efficient pathfinding algorithm used in various applications. By understanding the key concepts and step-by-step process, even beginners can implement and utilize this algorithm. With the provided implementations in Java and Python, you can now experiment with and apply the A* algorithm to your own projects. Happy coding!
Article Contributors
![]()
Subscribe to QABash Monthly Newsletter
Dominate – Stay Ahead of 99% Testers!